Les traductions sont fournies par des outils de traduction automatique. En cas de conflit entre le contenu d'une traduction et celui de la version originale en anglais, la version anglaise prévaudra.
Concepts de parallélisme des modèles
Le parallélisme des modèles est une méthode d’entraînement distribué dans laquelle le modèle de deep learning (DL) est partitionné sur plusieurs GPU et instances. La bibliothèque SageMaker model parallel v2 (SMP v2) est compatible avec les PyTorch API et fonctionnalités natives. Cela vous permet d'adapter facilement votre script d'entraînement FSDP ( PyTorch Fully Sharded Data Parallel) à la SageMaker plateforme d'entraînement et de tirer parti de l'amélioration des performances apportée par SMP v2. Cette page de présentation fournit un aperçu global du parallélisme des modèles et une description de la façon dont il peut aider à surmonter les problèmes liés à l’entraînement de modèles de deep learning (DL) qui sont généralement de très grande taille. Il fournit également des exemples de ce que propose la bibliothèque SageMaker model parallel pour aider à gérer les stratégies de modélisation parallèle et la consommation de mémoire.
Qu’est-ce que le parallélisme des modèles ?
L'augmentation de la taille des modèles de deep learning (couches et paramètres) permet une meilleure précision pour des tâches complexes telles que la reconnaissance d'image et le traitement du langage naturel. Toutefois, il y a une limite à la taille maximale de modèle que vous pouvez faire tenir dans la mémoire d'un GPU individuel. Lors de l'entraînement de modèles DL, les limites de mémoire du GPU peuvent constituer un goulet d'étranglement :
-
Elles limitent la taille du modèle que vous pouvez entraîner, car l’empreinte mémoire d’un modèle évolue proportionnellement au nombre de paramètres.
-
Elles limitent la taille de lot par GPU pendant l'entraînement, ce qui réduit l'utilisation du GPU et l'efficacité de l'entraînement.
Pour surmonter les limites associées à l'entraînement d'un modèle sur un seul GPU, l' SageMaker IA fournit la bibliothèque de modèles parallèles pour aider à distribuer et à entraîner efficacement les modèles DL sur plusieurs nœuds de calcul. En outre, avec la bibliothèque, vous pouvez obtenir un entraînement distribué optimisé à l'aide d' EFA-supported appareils, ce qui améliore les performances de communication entre les nœuds avec une faible latence, un débit élevé et un contournement du système d'exploitation.
Estimation des besoins en mémoire avant d’utiliser le parallélisme des modèles
Avant d'utiliser la bibliothèque SageMaker model parallel, considérez les points suivants pour vous faire une idée des besoins en mémoire liés à l'entraînement de grands modèles DL.
Pour une tâche d’entraînement utilisant les optimiseurs float16 (FP16) ou bfloat16 (BF16) et Adam, la mémoire GPU requise par paramètre est d’environ 20 octets, que nous pouvons décomposer comme suit :
-
Un paramètre FP16 ou BF16 ~ 2 octets
-
Un gradient FP16 ou BF16 ~ 2 octets
-
Un état d'optimiseur FP32 ~ 8 octets en fonction des optimiseurs Adam
-
Une copie de paramètre FP32 ~ 4 octets (requis pour l'opération
optimizer apply(OA)) -
Une copie de gradient FP32 ~ 4 octets (requis pour l'opération OA)
Même pour un modèle DL relativement petit avec 10 milliards de paramètres, il peut nécessiter au moins 200 Go de mémoire, ce qui est bien plus que la mémoire GPU classique (par exemple, NVIDIA A100 avec 40GB/80GB mémoire) disponible sur un seul GPU. En plus des besoins en mémoire pour les états de modèle et d’optimiseur, il existe d’autres consommateurs de mémoire, tels que les activations générées dans la transmission vers l’avant. La mémoire requise peut être largement supérieure à 200 Go.
Pour un entraînement distribué, nous vous recommandons d’utiliser des instances Amazon EC2 P4 et P5 équipées de NVIDIA A100 et H100 Tensor Core, respectivement. Pour plus de détails sur les spécifications telles que les cœurs de processeur, la RAM, le volume de stockage attaché et la bande passante du réseau, consultez la section Calcul accéléré de la page Types d'instances Amazon EC2
Même avec les instances de calcul accélérées, les modèles comportant environ 10 milliards de paramètres tels que Megatron-LM le T5 et les modèles encore plus grands avec des centaines de milliards de paramètres ne peuvent pas intégrer de répliques de modèles dans chaque périphérique GPU. GPT-3
Utilisation par la bibliothèque des techniques d’économie de mémoire et de parallélisme des modèles
La bibliothèque comprend différents types de fonctionnalités de parallélisme de modèle et de fonctionnalités d'économie de mémoire, telles que le partitionnement de l'état de l'optimiseur, les points de contrôle d'activation et le déchargement d'activation. Toutes ces techniques peuvent être combinées pour entraîner efficacement des modèles de grande taille composés de centaines de milliards de paramètres.
Rubriques
Parallélisme des données partitionnées
Le parallélisme de données partitionnées est une technique d'entraînement distribué qui permet d'économiser de la mémoire et qui divise l'état d'un modèle (paramètres du modèle, gradients et états de l'optimiseur) entre les GPU dans un groupe de parallélisme de données.
Vous pouvez appliquer le parallélisme partitionné des données à votre modèle en tant que stratégie autonome. De plus, si vous utilisez les instances GPU les plus performantes équipées de GPU NVIDIA A100 Tensor Coreml.p4de.24xlarge, ml.p4d.24xlarge vous pouvez profiter d'une vitesse d'entraînement améliorée grâce au AllGather fonctionnement proposé par la bibliothèque de parallélisme des SageMaker données (SMDDP).
Pour explorer davantage le parallélisme partitionné des données et découvrir comment le configurer ou utiliser une combinaison du parallélisme partitionné des données et d’autres techniques telles que le parallélisme de tenseur et l’entraînement de précision mixte, consultez Parallélisme partitionné des données hybrides.
Parallélisme expert
SMP v2 s'intègre à NVIDIA Megatron
Un modèle MoE est un type de modèle de transformeur composé de plusieurs experts, chacun constitué d’un réseau neuronal, généralement un réseau à propagation avant (FFN). Un réseau de portes appelé routeur détermine quels jetons sont envoyés à quel expert. Ces experts sont spécialisés dans le traitement d’aspects spécifiques des données d’entrée, ce qui permet au modèle de s’entraîner plus rapidement, de réduire les coûts de calcul, tout en obtenant la même qualité de performance que le modèle dense équivalent. Le parallélisme expert est une technique de parallélisme qui gère la division des experts d’un modèle MoE entre différents dispositifs GPU.
Pour découvrir comment entraîner des modèles MoE avec SMP v2, consultez Parallélisme expert.
Parallélisme de tenseur
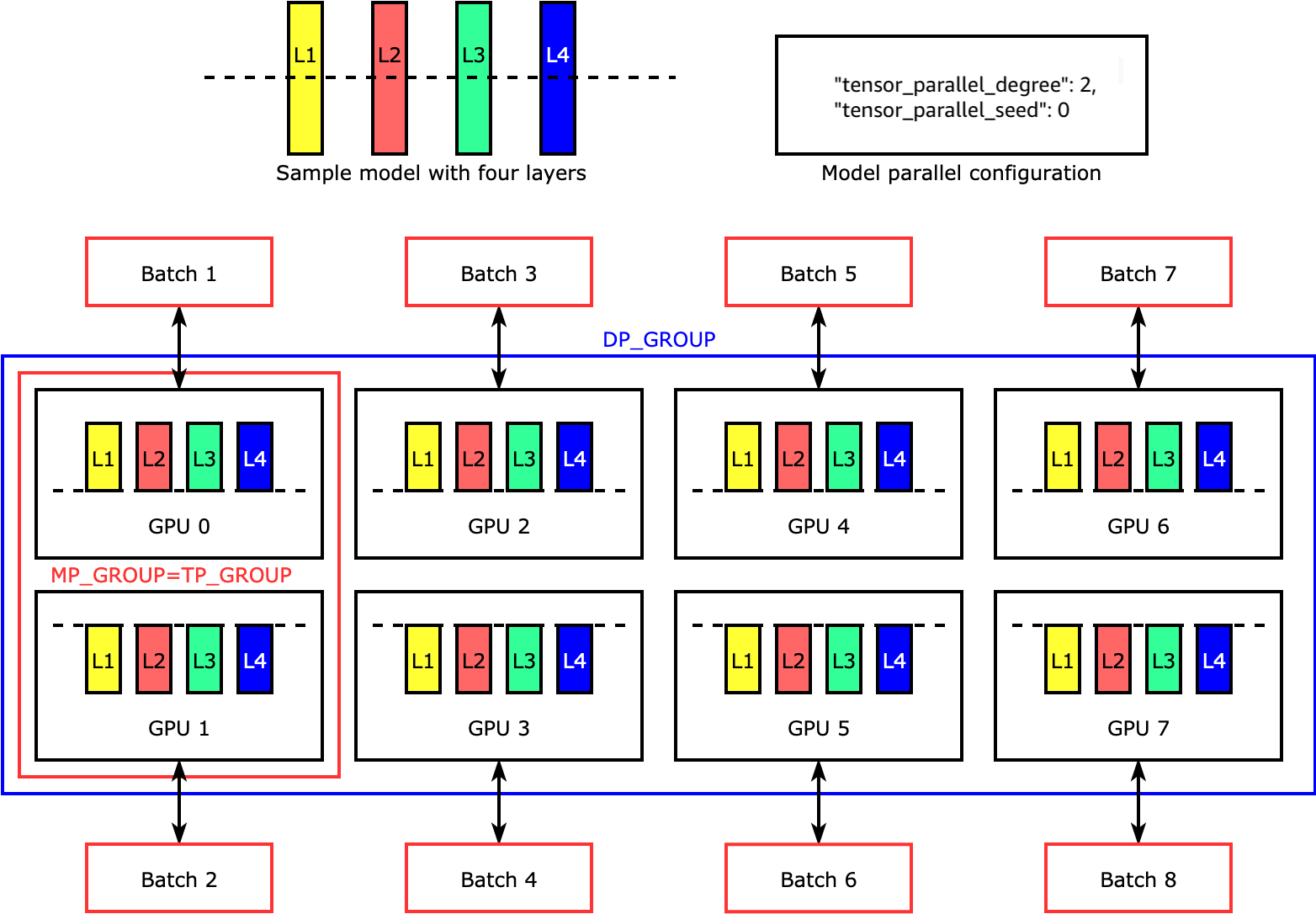
Le parallélisme de tenseur divise les couches individuelles, ou nn.Modules, entre les dispositifs pour une exécution en parallèle. La figure suivante illustre l’exemple le plus simple de la façon dont la bibliothèque SMP divise un modèle à quatre couches pour obtenir un parallélisme de tenseur bidirectionnel ("tensor_parallel_degree": 2). Dans la figure suivante, les notations pour le groupe de parallélisme des modèles, le groupe de parallélisme de tenseur et le groupe de parallélisme des données sont respectivement MP_GROUP, TP_GROUP et DP_GROUP. Les couches de chaque réplica de modèle sont divisées et distribuées dans deux GPU. La bibliothèque gère la communication entre les réplicas de modèles distribués par tenseur.
Pour en savoir plus sur le parallélisme des tenseurs et les autres fonctionnalités permettant d'économiser de la mémoire PyTorch, et pour savoir comment définir une combinaison des fonctionnalités de base, voir. Parallélisme de tenseur
Points de contrôle d’activation et déchargement
Pour enregistrer la mémoire GPU, la bibliothèque prend en charge les points de contrôle d'activation afin d'éviter de stocker des activations internes dans la mémoire GPU pour les modules spécifiés par l'utilisateur pendant la transmission vers l'avant. La bibliothèque recalcule ces activations pendant la transmission vers l'arrière. En outre, avec le déchargement d’activation, elle décharge les activations stockées dans la mémoire du CPU et les récupère dans le GPU pendant la transmission vers l’arrière afin de réduire encore l’empreinte mémoire de l’activation. Pour plus d’informations sur l’utilisation de ces caractéristiques, consultez Points de contrôle d'activation et Déchargement d’activation.
Choix des techniques appropriées pour votre modèle
Pour plus d’informations sur le choix des bonnes techniques et configurations, consultez SageMaker meilleures pratiques en matière de parallélisme des modèles distribués.
